“异步电动机”的版本间的差异
| (未显示同一用户的6个中间版本) | |||
| 第4行: | 第4行: | ||
| − | + | 运行时,将定子绕组接到交流电源上,产生<big>'''旋转磁场'''</big>,原本静止的转子绕组产生<big>'''电磁感应'''</big>,'''<big>被</big>'''带动旋转 | |
| − | + | 假设转子绕组和磁场'''同步'''旋转,此时两者之间'''相对静止''',转子就'''无法'''产生电磁感应'''维持转动''' | |
| − | + | 因此转子绕组总是比旋转磁场的频率稍慢,这就是<big>'''异步'''</big>的来源 | |
| − | + | 大部分此类电动机,转子是可转动的导体,通常多呈鼠笼状。因此也叫<big>'''鼠笼'''</big>电动机。此外,还有绕线式异步电动机等类型 | |
| − | + | [[Image:感应电动机原理.jpg]] | |
== 优缺点 == | == 优缺点 == | ||
| 第20行: | 第20行: | ||
缺点:功率因数较差 | 缺点:功率因数较差 | ||
| + | |||
== 主要型号 == | == 主要型号 == | ||
| 第29行: | 第30行: | ||
JD-185:异步多速电动机,上海电车JNP6120BEV1(J2B) | JD-185:异步多速电动机,上海电车JNP6120BEV1(J2B) | ||
| − | [[Category:公交车型]] | + | |
| + | [[Category:公交车型]][[Category:定义和技术]] | ||
2022年2月12日 (六) 19:58的最新版本
定义
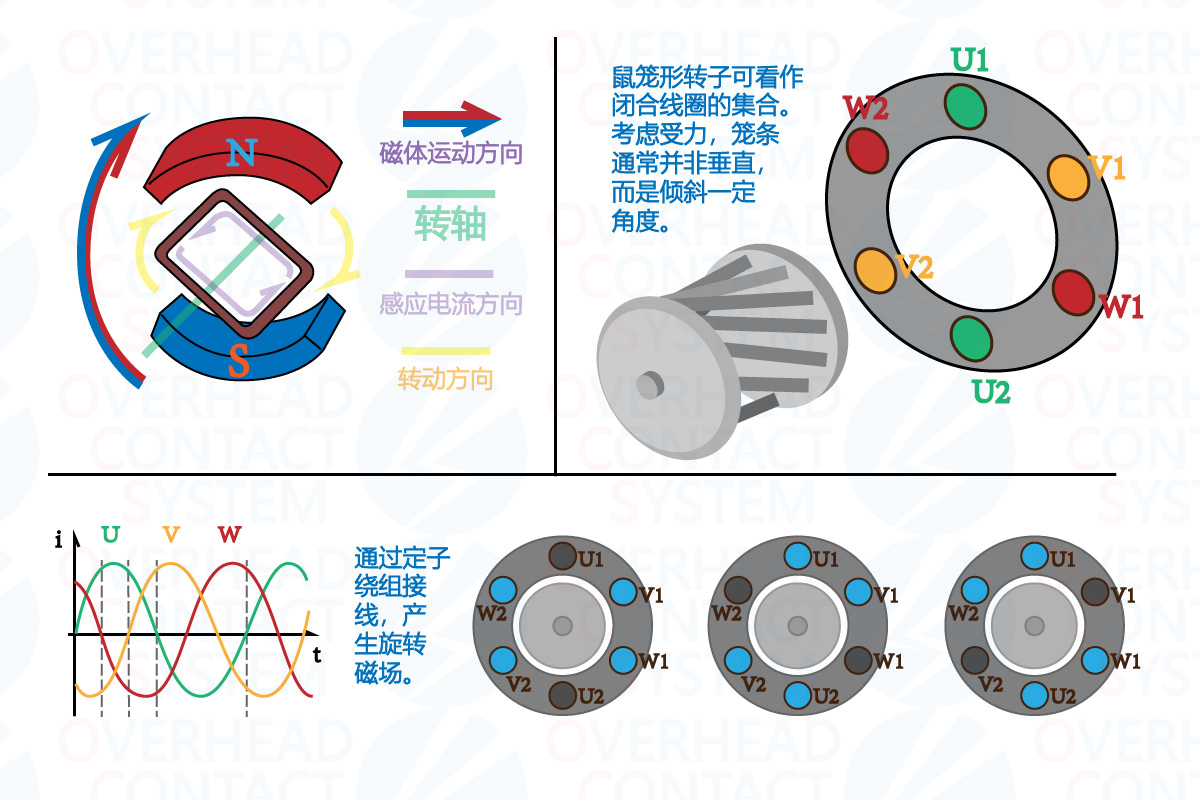
异步电动机或感应电动机,是一种转子置于旋转磁场中转动的电动机
运行时,将定子绕组接到交流电源上,产生旋转磁场,原本静止的转子绕组产生电磁感应,被带动旋转
假设转子绕组和磁场同步旋转,此时两者之间相对静止,转子就无法产生电磁感应维持转动
因此转子绕组总是比旋转磁场的频率稍慢,这就是异步的来源
大部分此类电动机,转子是可转动的导体,通常多呈鼠笼状。因此也叫鼠笼电动机。此外,还有绕线式异步电动机等类型

优缺点
优点:结构简单易制造、价格低廉、运行可靠、坚固耐用、运行效率较高、适用性强等
缺点:功率因数较差
主要型号
Y/J系列:异步电动机
例:YQ-365:异步牵引电动机,CRH2C
JD-185:异步多速电动机,上海电车JNP6120BEV1(J2B)